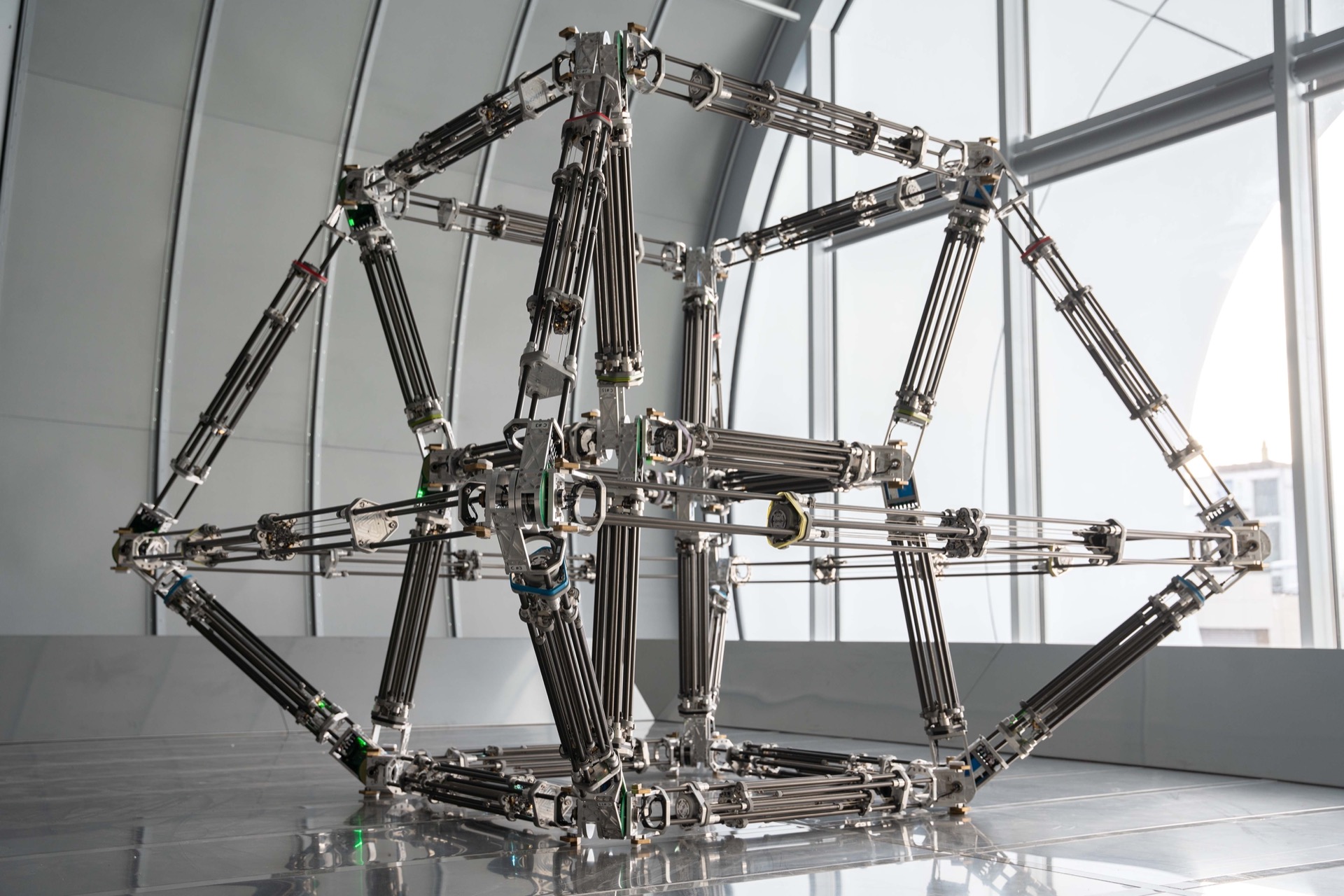
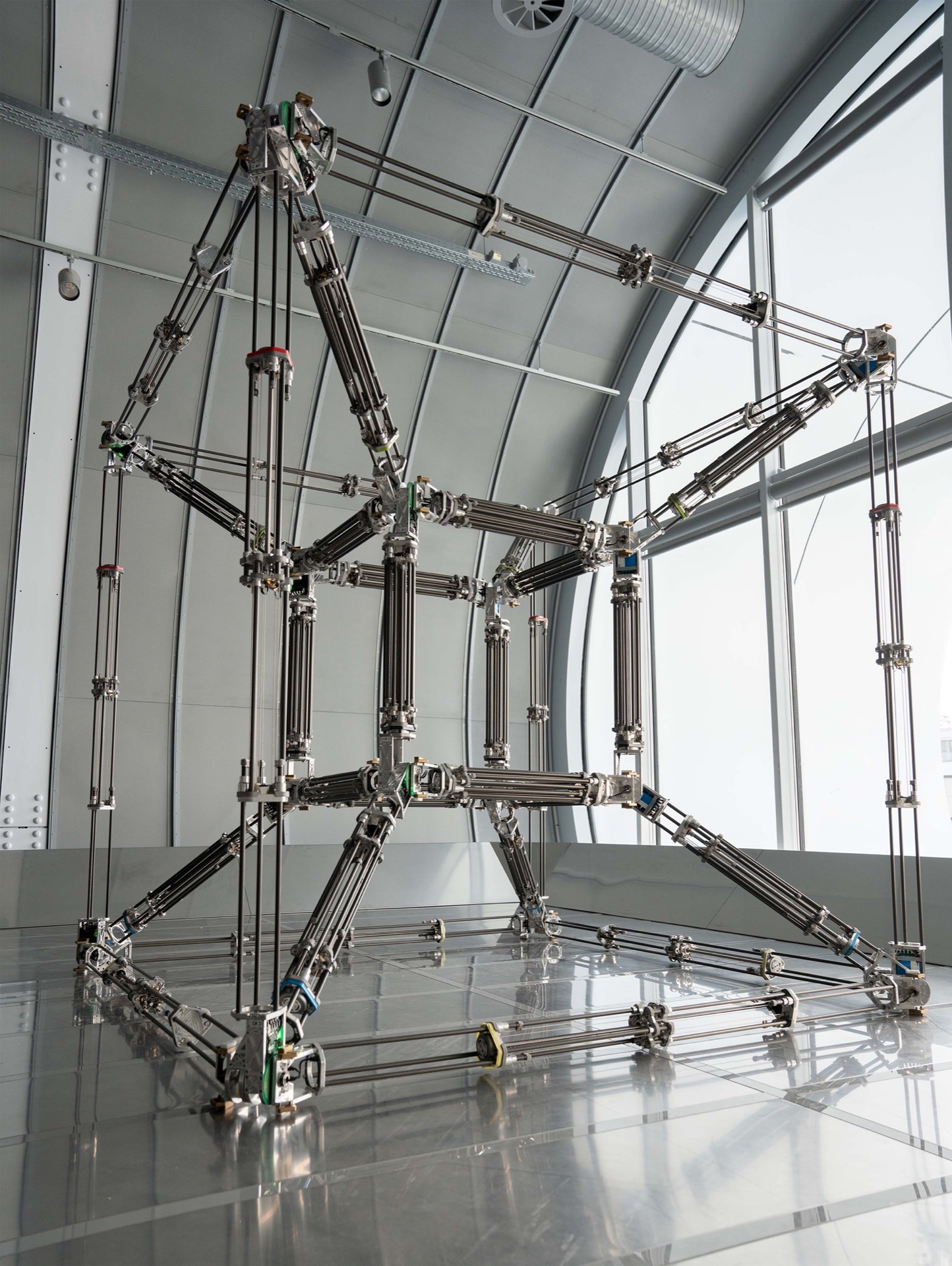
Created for Exploring the Unknown exhibition at the CERN Science Gateway by Julius von Bismarck & Benjamin Maus, Round About Four Dimensions sculpture represents a “hypercube”, “four-cube” or “tesseract”, often cited in mathematical and physical theories to illustrate concepts beyond three spatial dimensions.
We naturally conceive of three spatial dimensions, yet envisioning more becomes a challenge to our imagination. To understand these complexities, even physical theories rely on specific tricks. Just as three-dimensional objects cast two-dimensional shadows, four-dimensional entities translate into three-dimensional forms. When a four-dimensional body rotates, its three-dimensional shadow seems to invert. Here, that abstract notion is made a visible reality.
Julius von Bismarck & Benjamin Maus
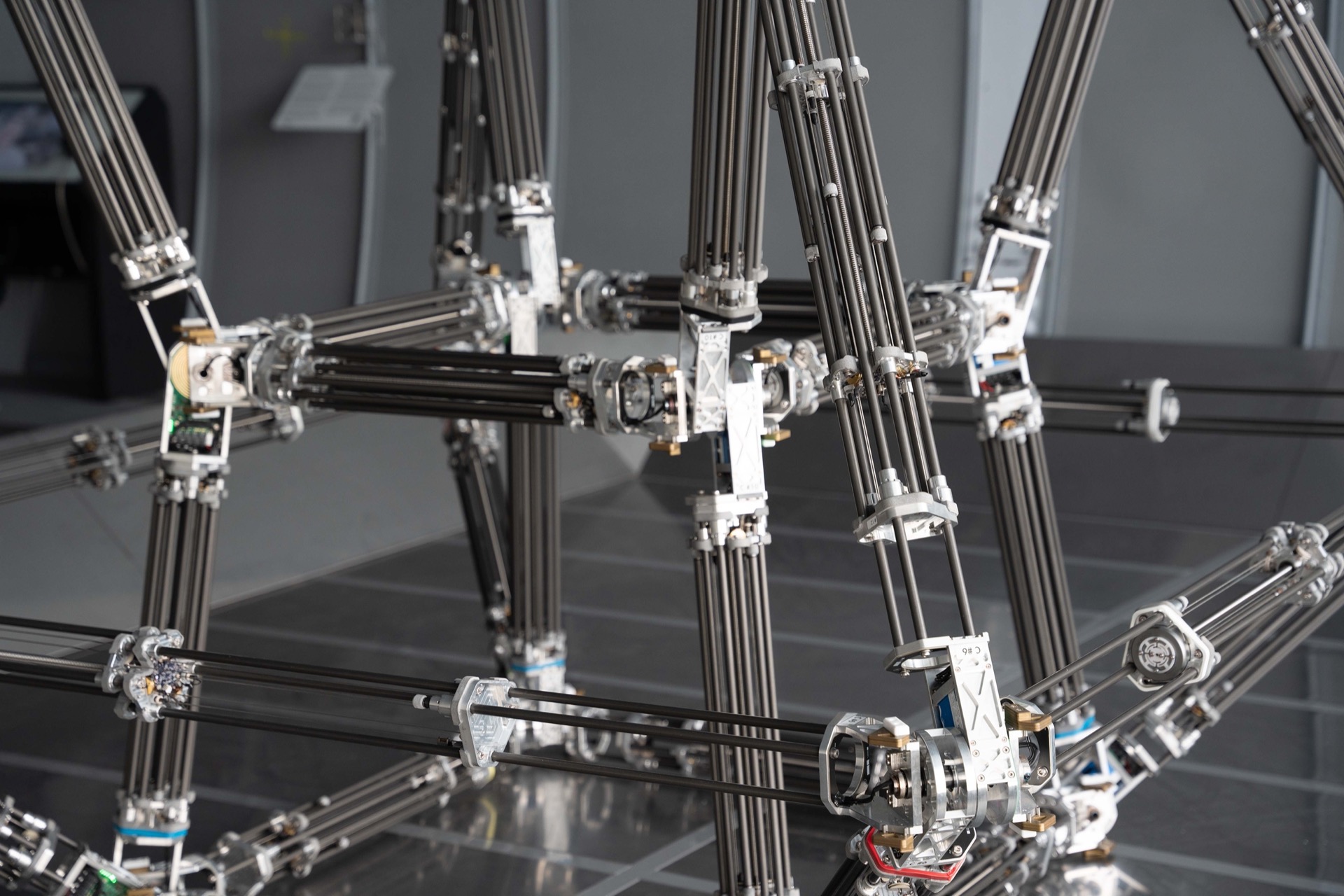
The Tesseract will perform a revolving movement, turning itself inside-out and outside-in continuously. In the initial configuration a small inner cube is positioned in the center of a large outer cube. The revolution begins with the inner cube moving towards one face of the outer cube. It will then protrude that face and move out of the outer cube. The edges of the inner cube will then extend, enlarging the inner cube. The opposite face of the outer cube will shrink. When the inner cube has completely run through the previous outer cubes face a new outer cube and a new inner cube has formed. One movement cycle will take between 20 and 90 seconds.
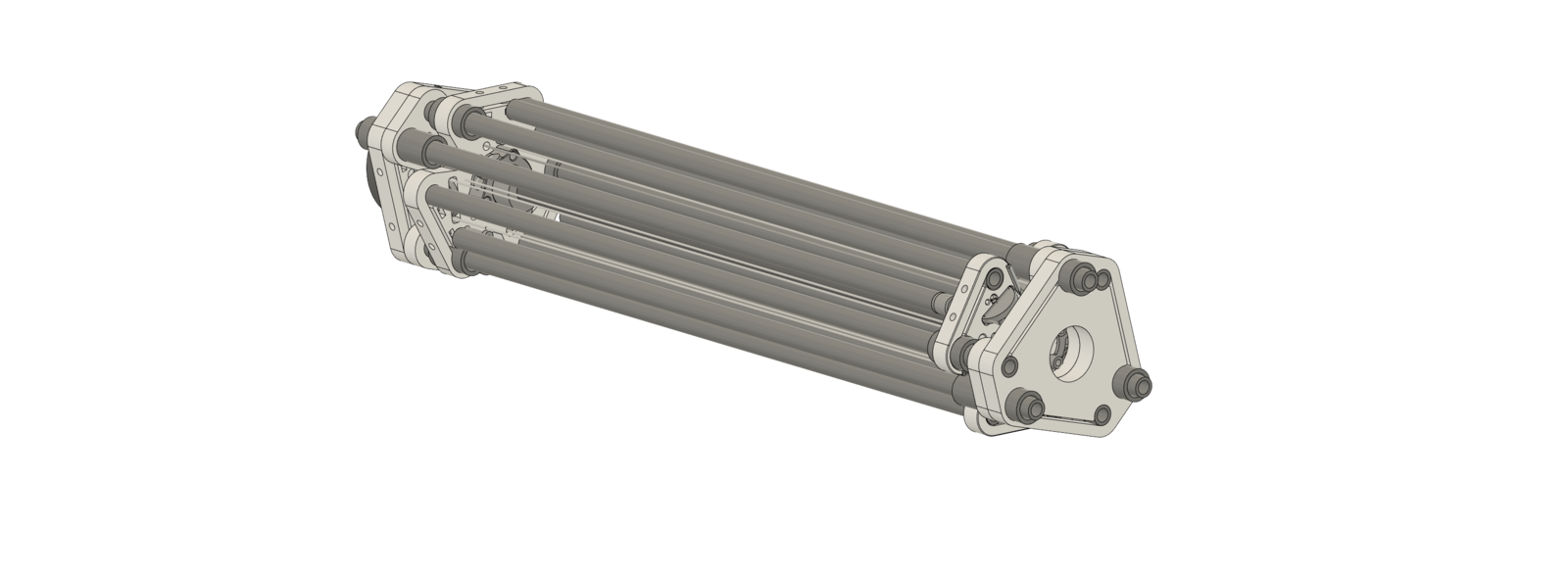
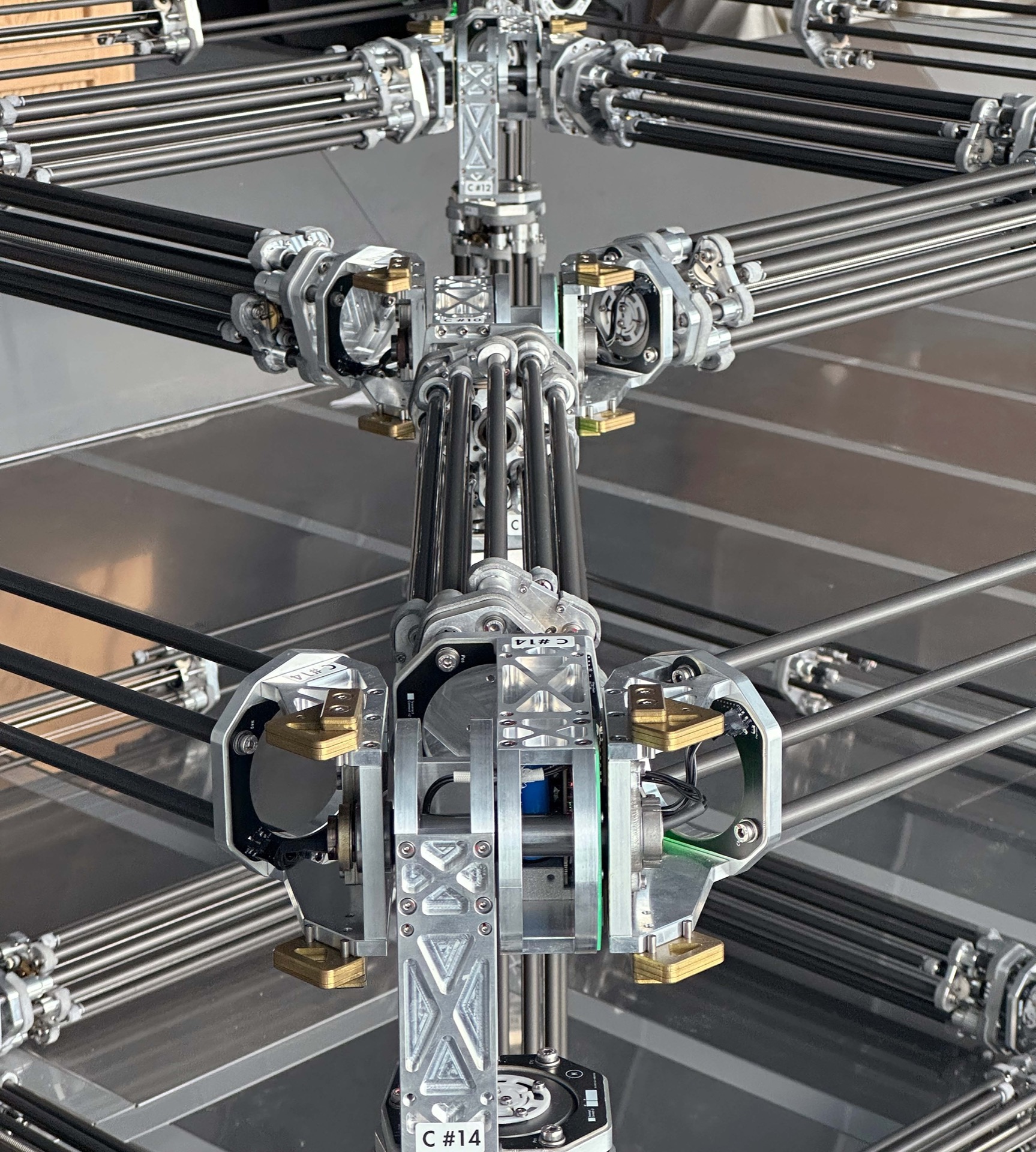
The majority of parts are made from aluminium and different types of polymer. Steel is used in places where strength (e.g. ball screw, shafts and screws) is necessary. The edges, formed by telescopic actuators are mainly made of hard anodized aluminium pipes and CNC milled aluminium parts. The corner joints are composed of a stack of cylindrical parts enclosing a hollow shaft and wings that connect to the outer stages of the telescopic actuators.
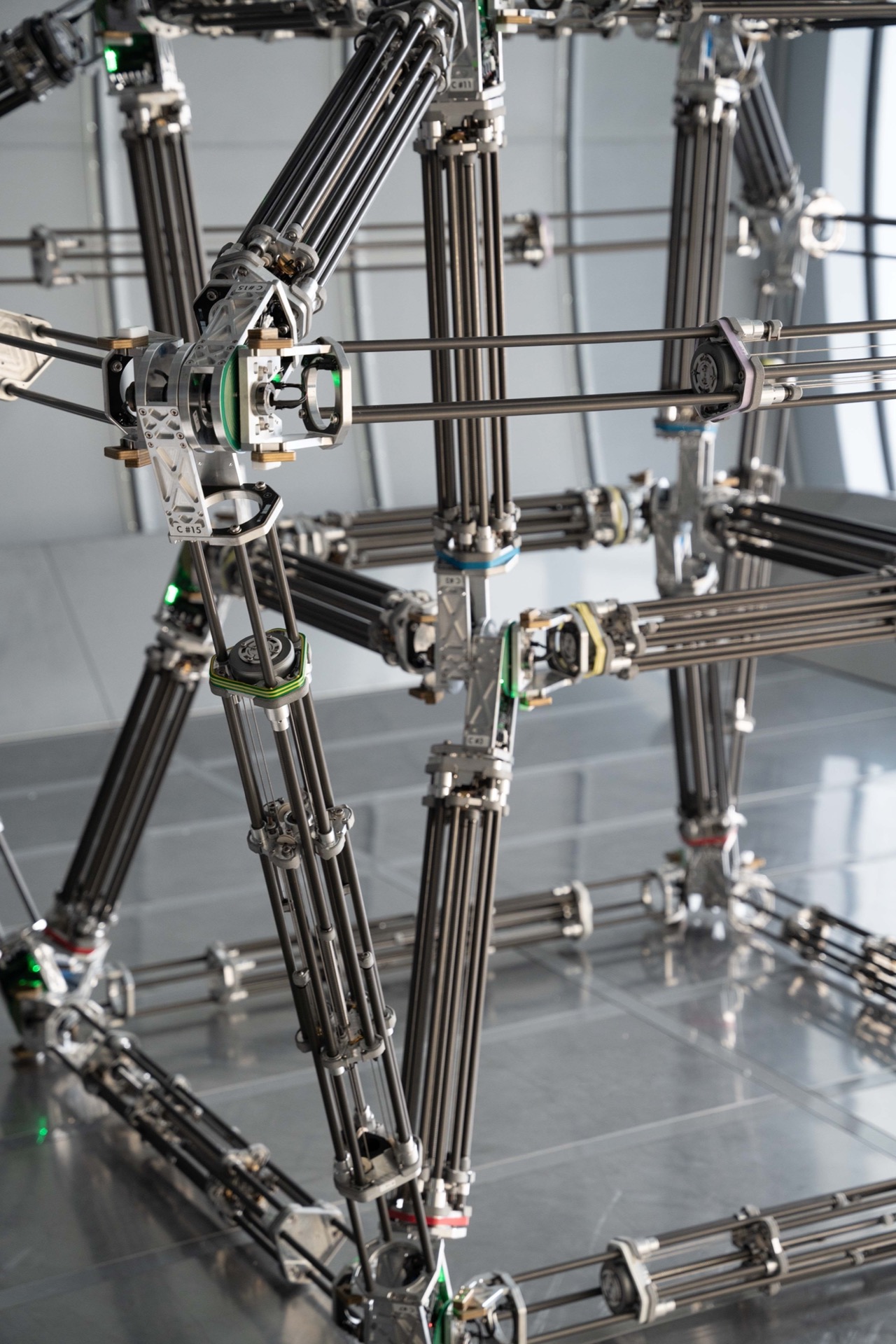
During maximum extension, the Tesseract reaches dimensions of up to 230 cm x 230 cm x 230 cm. The Tesseract consists of 32 edges, formed by telescopic actuators and 16 corners, formed by corner joints. The total weight of the Tesseract is 150 kg.
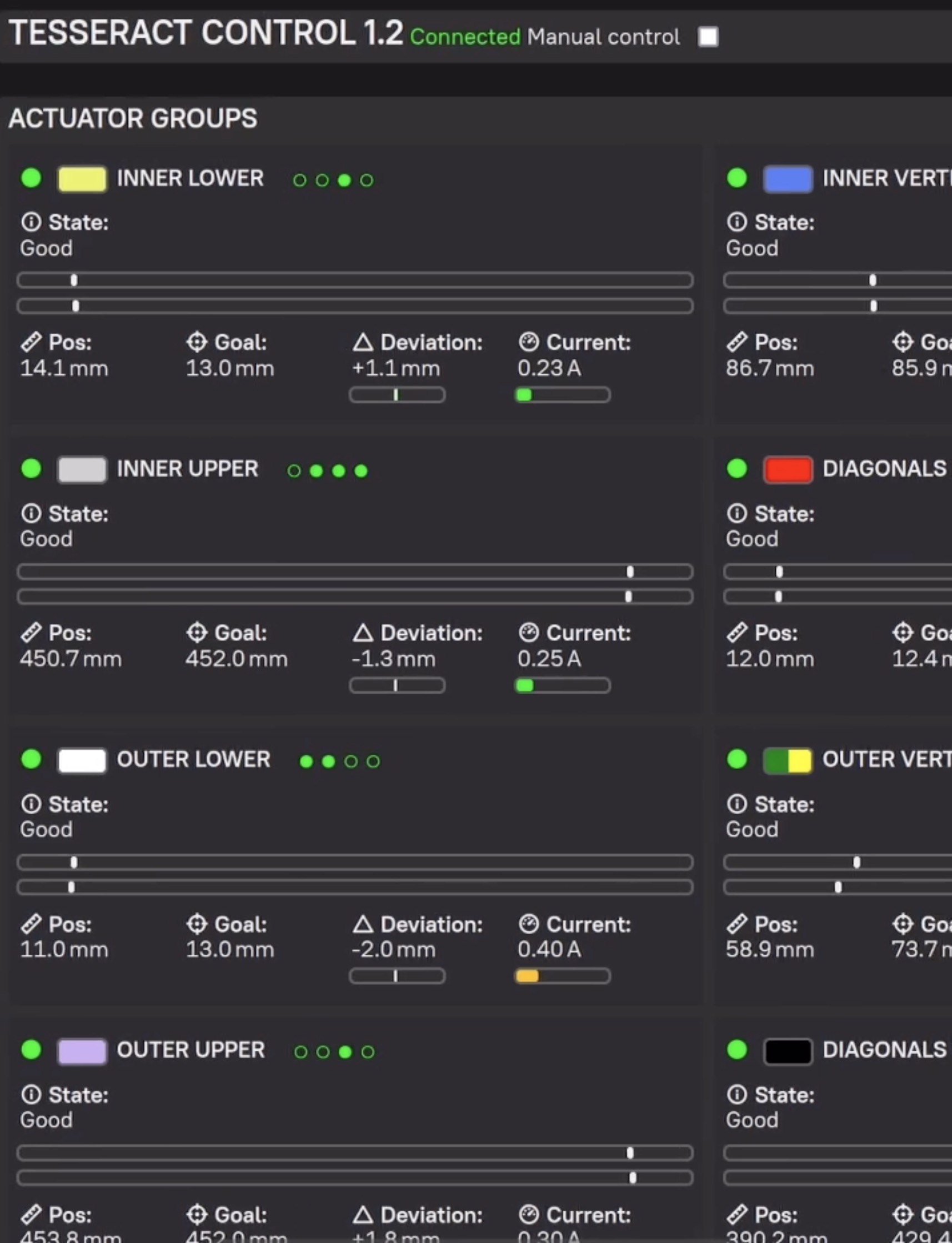
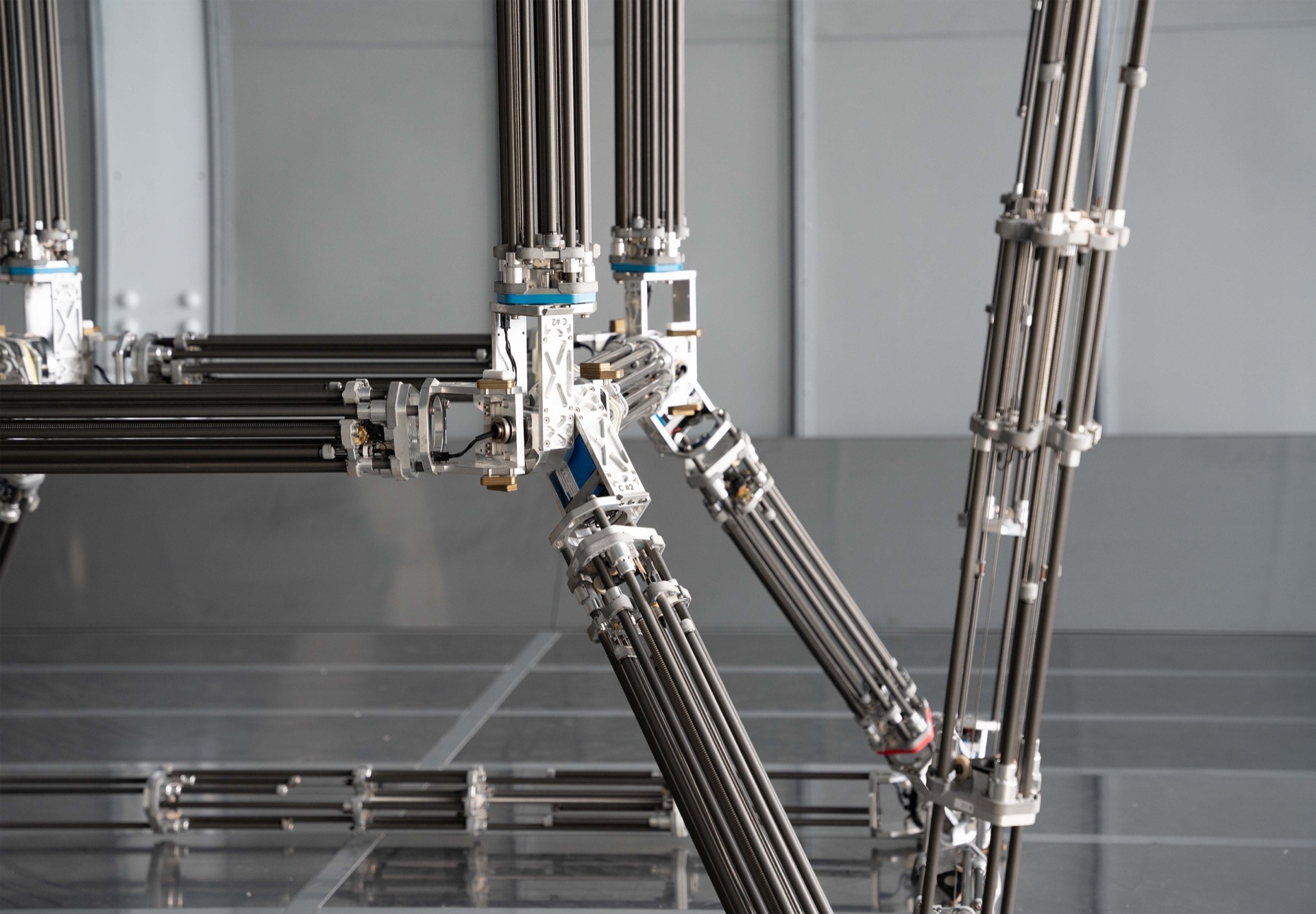
The movement is actuated by changing the length of the Tesseract edges through custom-built telescoping actuators. The actuator consists of 4 stages. The two inner stages are linearly moving through a ball screw driven by a brushless DC motor. The two outer stages are linked with cable drives that are translating the motion of the inner stages to the outer stages. The aggregated extension of the telescopic actuator is linked to the relative translation between two stages, and thus to the ball screw motion, with a transmission ratio of three.
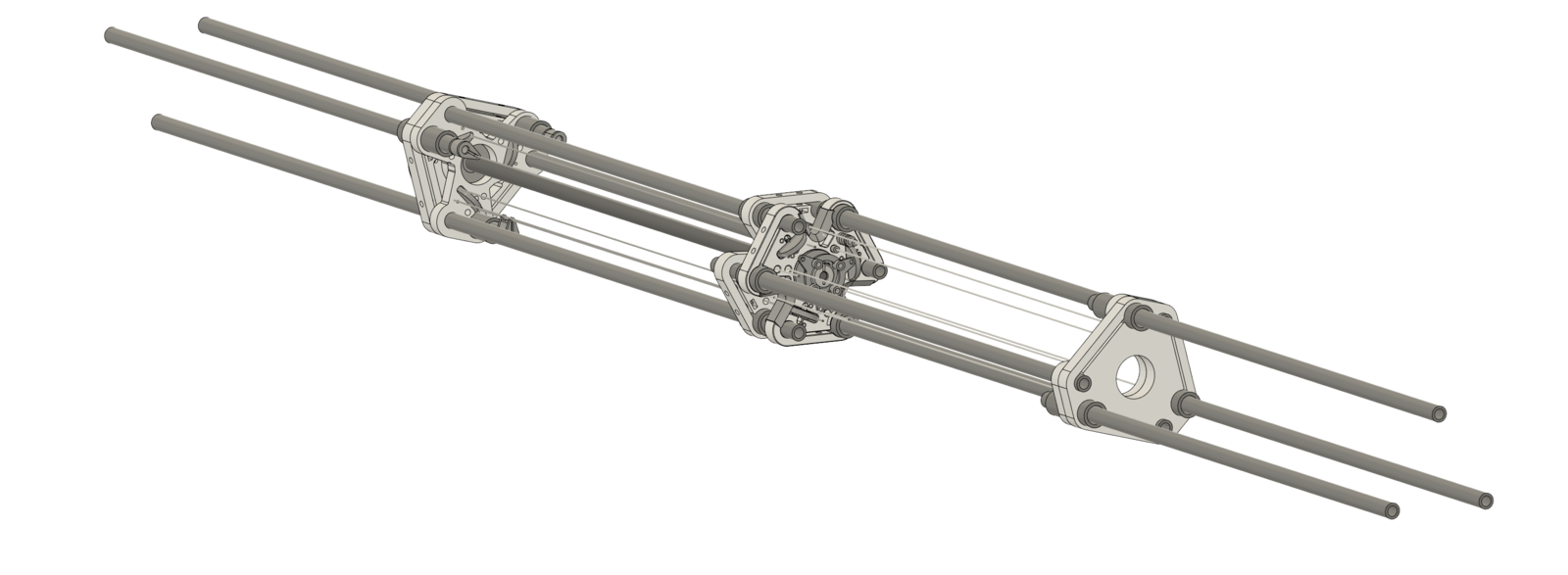
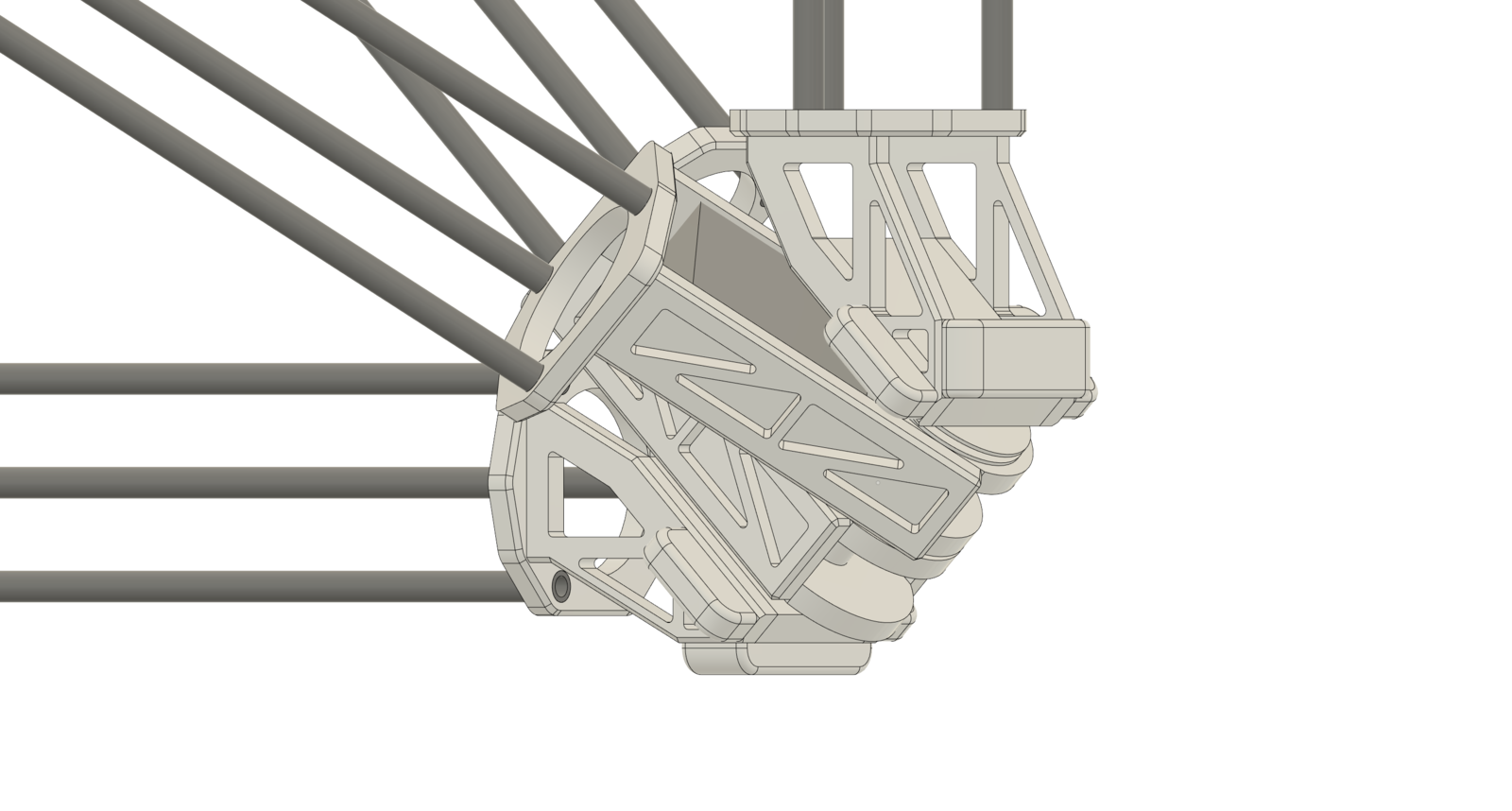
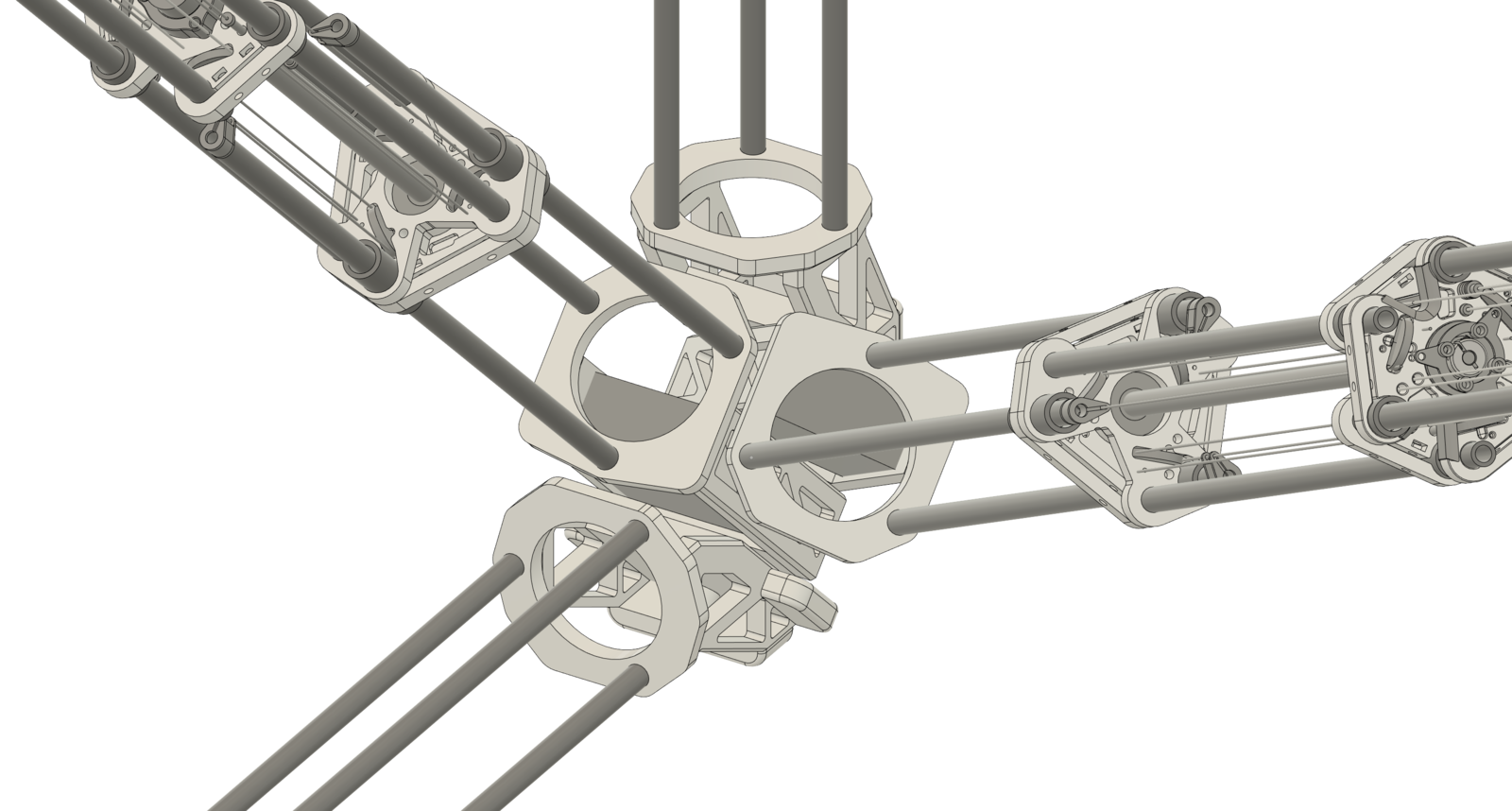
The telescopic actuators are connected at corner joints. The corner joint (below) has a hollow shaft that is the axis of rotation. Two of the four adjacent edges rotate continuously around the axis but do not change more than 180 degrees in regards to each other. The other two adjacent edges are rigidly connected through a hollow shaft. The corners are not actively actuated. There are 16 corner joints in total.
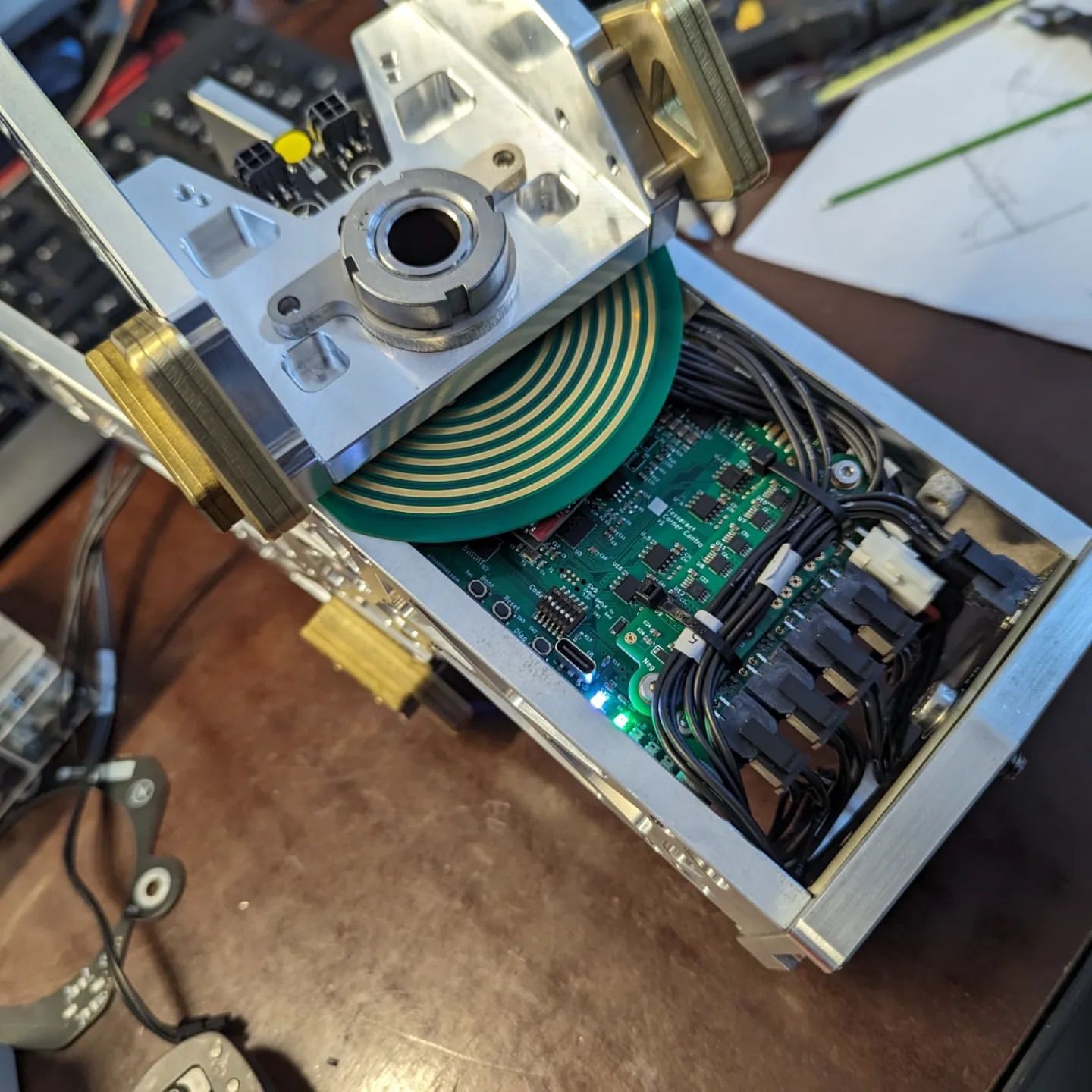
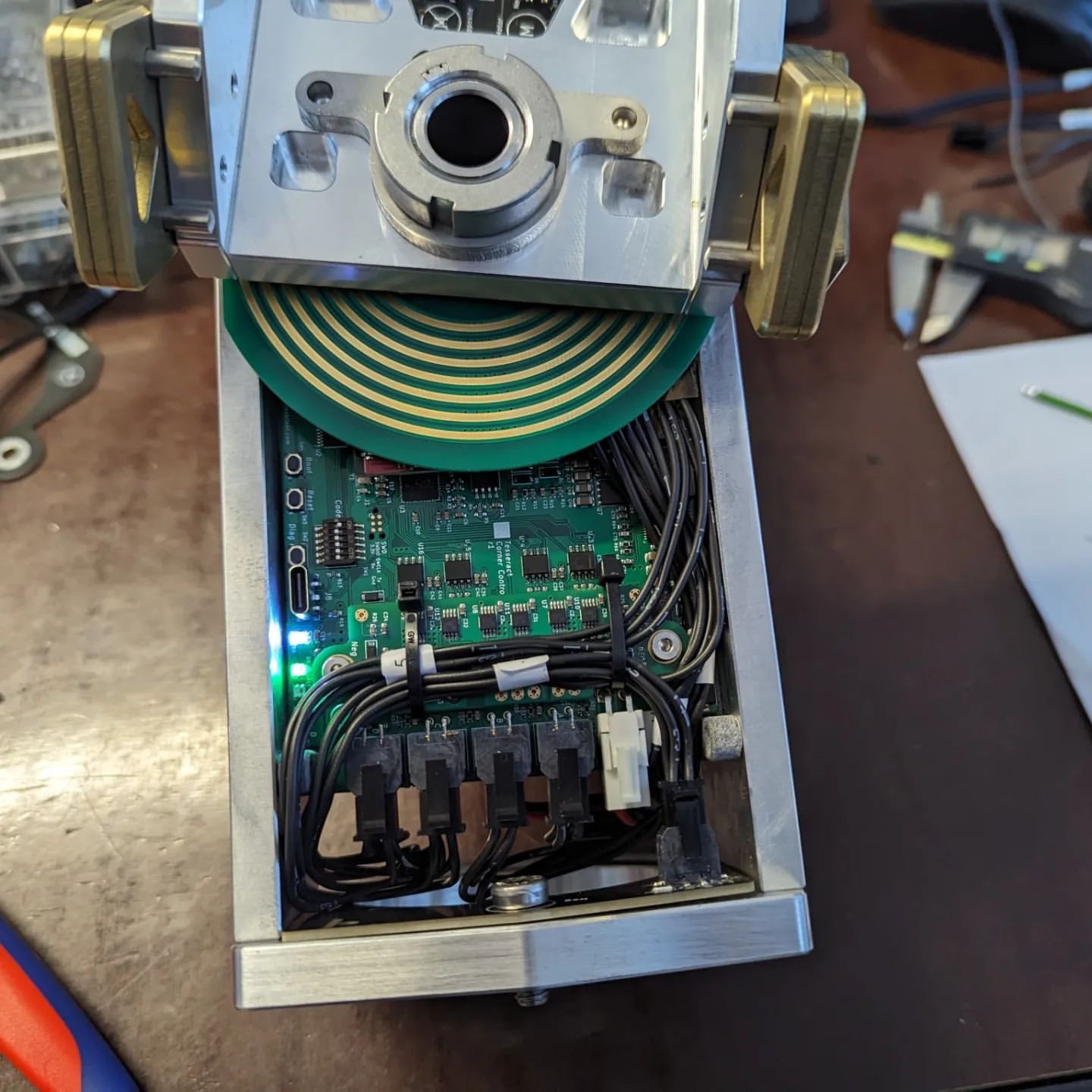
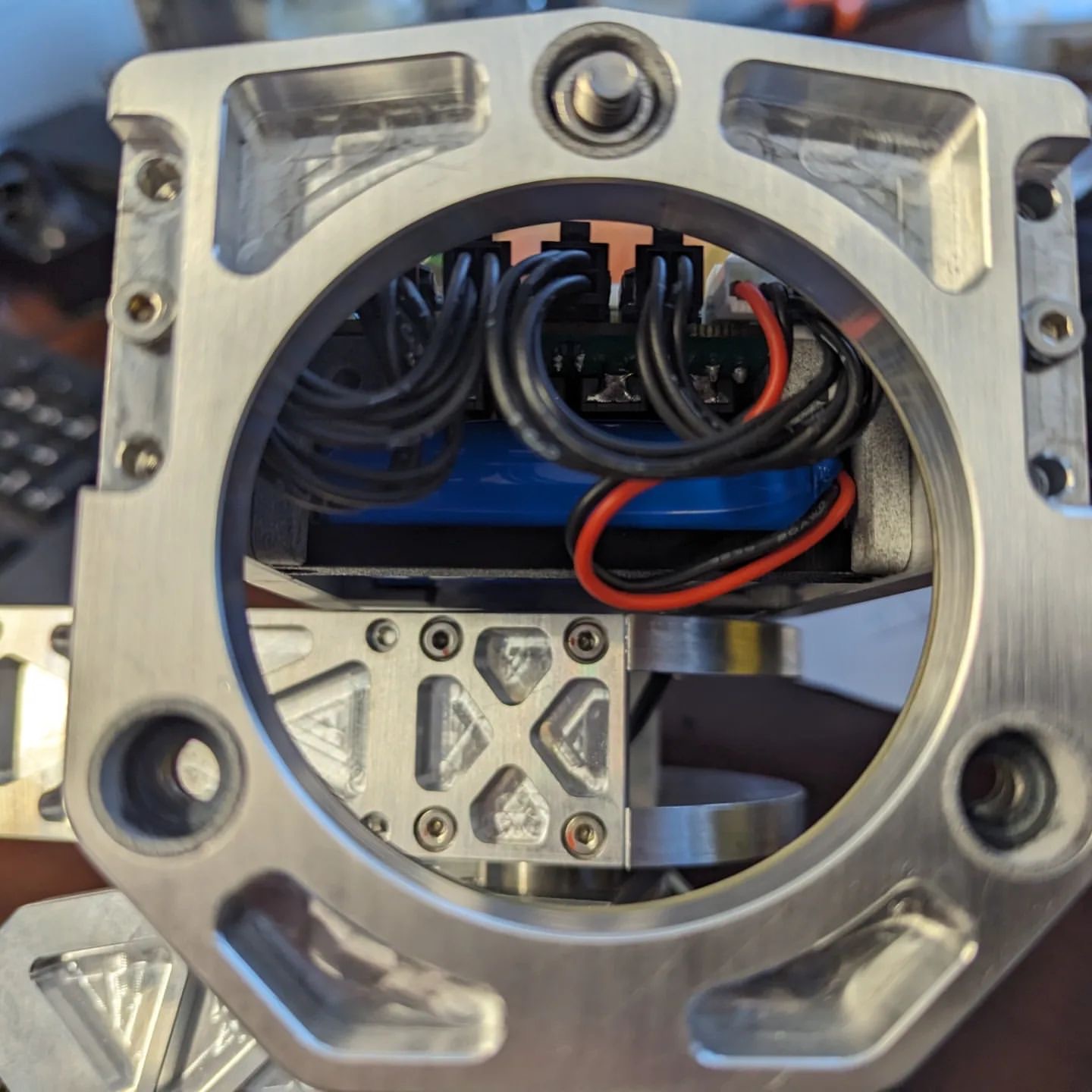
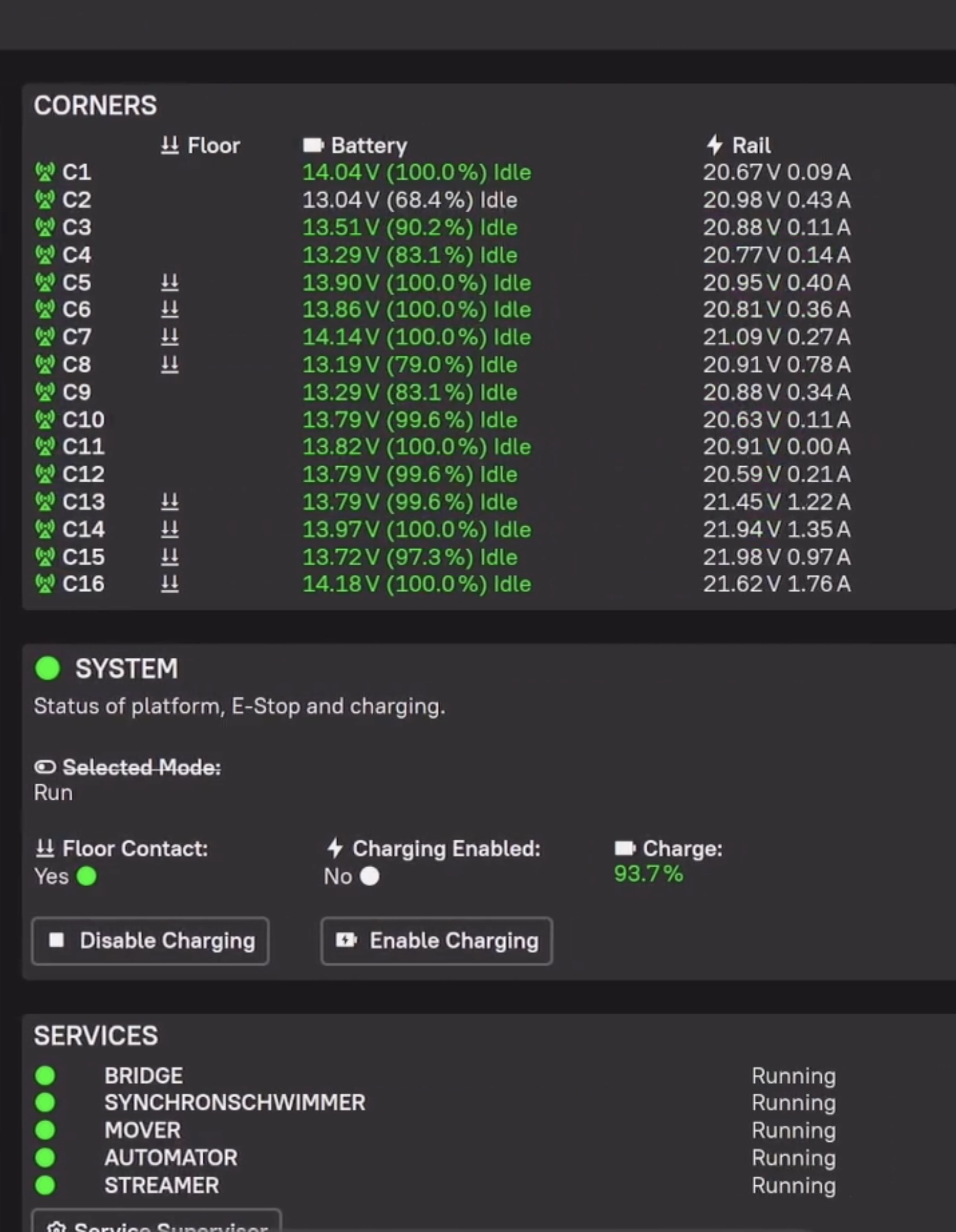
The tesseract is electrically powered by rechargeable Batteries which are continuously recharged through the installation floor. The corner joints are the point of contact with the floor and are facilitating the electrical connection with the floor panels of the platform. The corners also house LiFePo4 Batteries and power management circuit boards.
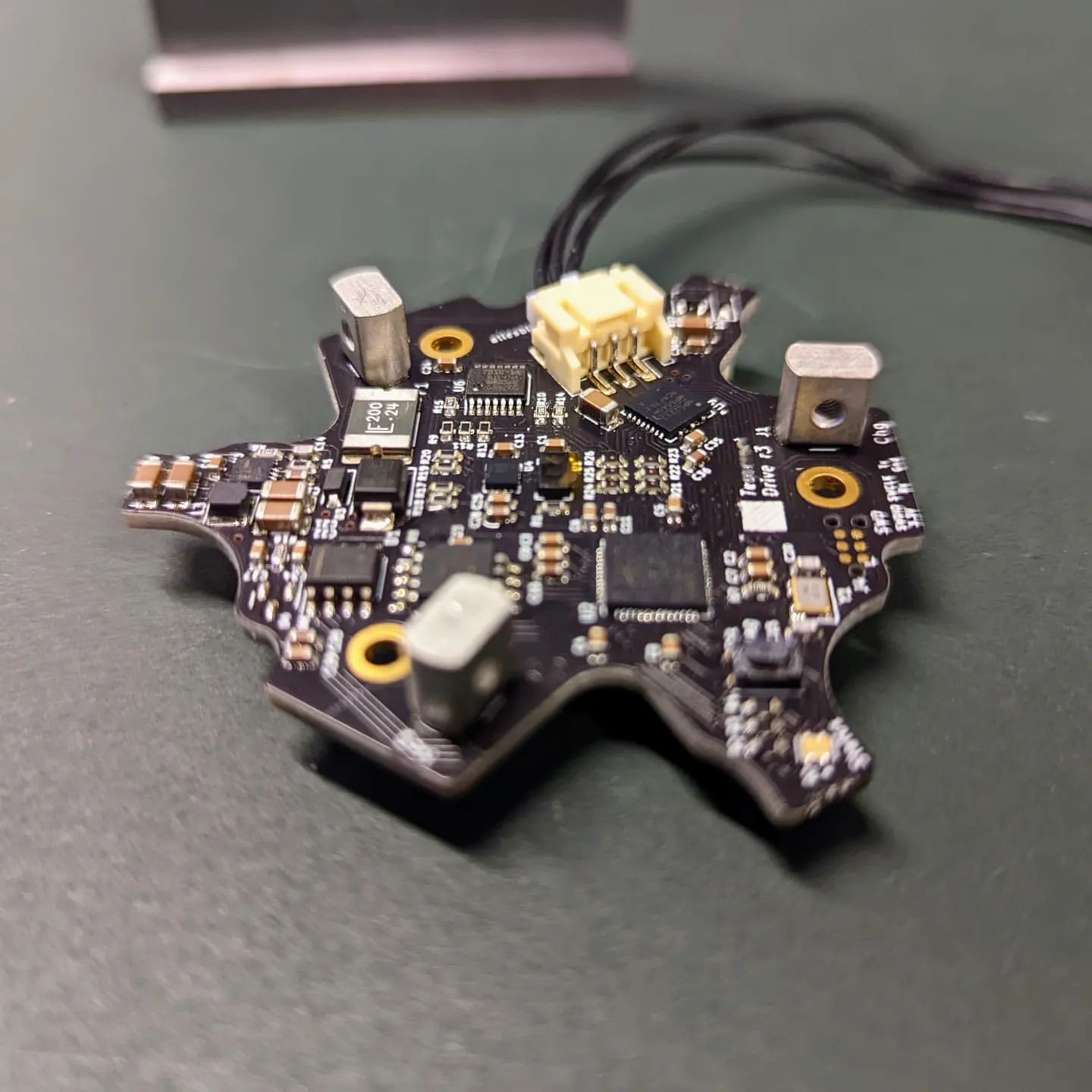
Each “edge” includes a BLDC motor (high torque), RP2040 MCU, BLDC driver IC (MP6540), magnetic encoder (AS5600), custom powerline communication using an RS485 transceiver with inductors and capacitive coupling. data is modulated using Manchester coding in RP2040 programmable IO (PIO), ST VL53L0X ToF sensor and gold plated brass pulleys (power runs on the steel wires). Power managment is achieved in the corners and comprised of LiFePo4 batteries, RP2040 MCU, three-leg full bridge rectifier getting power from the platform floor, High-Side switches for protection, Würth Elektronik RF Module and custom pancake slipring. All firmwares use Arduino-Pico core and the Pico-SDK. Code is in C++. The high-level control on the computer is 8 Python programs (e.g. Communication Bridge, Group Controller, Web UI, 4D projection of hypercube to 3D to figure out the lengths). They are communicating through messages on topics, similar to ROS, but in pure Python using a custom robotics framework (capek).
The sculpture attempts to remind us of the boundaries of our understanding and concepts we struggle to wrap our heads around. While it may not provide answers, it’s intention is to invite CERN’s visitors to ponder the complexity of the Universe.
Julius von Bismarck | Benjamin Maus | Arts at CERN | Exploring the Unknown
Design and engineering: Benjamin Maus, Piet Schmidt, Orlando Helfer Rabaça, Martin Schied.
/++



/++